
Dans cette rubrique
-
 Activité 1 : Comment programmer une DEL ?
- 23 février 2016
Activité 1 : Comment programmer une DEL ?
- 23 février 2016
-
Activité 2 : comment faire tourner un moteur ?
- 23 février 2016
-
Activité 3 : Comment programmer les moteurs ?
- 12 novembre 2017
-
Activité 4 : Comment programmer des déplacements ?
- 24 février 2016

![]() Mettre en place la carte de contrôle des moteurs :
Mettre en place la carte de contrôle des moteurs :
Cette page présente l’utilisation du Shield Moteur officiel Arduino (carte de pilotage des moteurs)....vous pouvez retrouver les fiches explicatives correspondant à d’autres Shield Moteur Non officiel et moins cher.... Shield Basique L298 ou Shield Adafruit
Avant de pouvoir programmer le fonctionnement des deux moteurs à courant continu, il faut assemble la carte de contrôle des moteur (Shield moteur) sur la carte Arduino Uno. Il suffit pour cela d’enficher le Shield sur la carte Arduino :

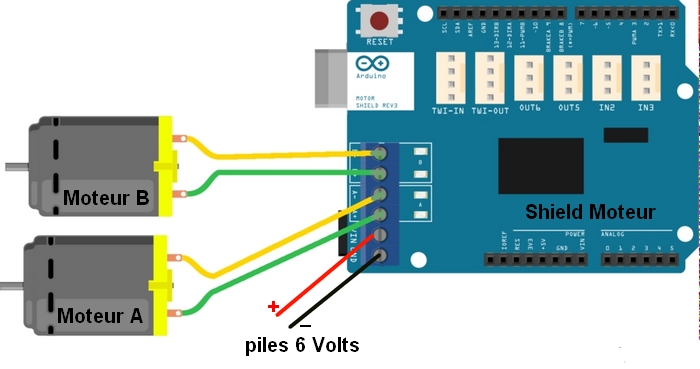
![]() Le branchement des moteurs et de la source d’énergie :
Le branchement des moteurs et de la source d’énergie :
Les moteurs doivent être branchés conformément au schéma suivant :
Moteur B = Roue GAUCHE Moteur A = Roue DROITE
Alimentation 6 Volts environ...
![]() comment programmer la carte de contrôle des moteurs (Shield moteur) ?
comment programmer la carte de contrôle des moteurs (Shield moteur) ?
Pour programmer les moteurs (tourne sens 1 ou 2 / arrêt / choix de la vitesse) il suffit de programmer les sorties permettant de piloter chaque fonction :

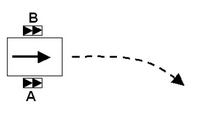
Par exemple pour programmer la marche AVANT du Robot :

Vous devez maintenant réaliser le programme ARDUBLOCK sur l’ordinateur et le transférer dans la carte ARDUINO avec le cable USB.
Le Robot doit AVANCER TOUT DROIT -
Résolution des éventuels problèmes techniques
- Le robot n’avance pas tout droit ? (tourne sur lui même ou recule ? : vous devez inverser le sens de branchement du ou des moteurs ne tournant pas en marche avant (desserrez les vis et inverser le branchement des fils des moteurs ) jusqu’à obtenir un robot qui avance tout droit.
![]() Si un moteur ne tourne pas du tout ?
vérifiez l’état des piles - vérifiez la bonne connexion des fils électriques - recommencez le transfert du programme vers la carte Arduino.
Si un moteur ne tourne pas du tout ?
vérifiez l’état des piles - vérifiez la bonne connexion des fils électriques - recommencez le transfert du programme vers la carte Arduino.
![]() Le robot avance trop vite ?
Il faut baisser la vitesse des deux moteurs (sorties analogiques 3 et 11)
Le robot avance trop vite ?
Il faut baisser la vitesse des deux moteurs (sorties analogiques 3 et 11)
rappel : vitesse variable de 0 à 255
![]() Le robot avance mais tire vers la GAUCHE :
Le robot avance mais tire vers la GAUCHE :

Le Moteur A tourne trop vite ----> baisser la vitesse MotA (sortie Analogique 3)
rappel : vitesse variable de 0 à 255
![]() Le robot avance mais tire vers la DROITE :
Le robot avance mais tire vers la DROITE :
Le Moteur B tourne trop vite ----> baisser la vitesse Mot B (sortie Analogique 11)
rappel : vitesse variable de 0 à 255
Attention : Après chaque modification du programme Ardublock, il faut connecter la carte Arduino sur l’ordinateur (avec le câble USB ) et transférer le nouveau programme modifié......
Dès que votre Robot avance à vitesse adaptée et à peu près droit vous pouvez passer à l’activité 4 après avoir enregistré votre programme Ardublock .
Bilan de l’activité :
![]() votre robot est autonome : il gère son déplacement en marche avant tout seul car il est programmé pour cela.
votre robot est autonome : il gère son déplacement en marche avant tout seul car il est programmé pour cela.
![]() Le programme est sauvegardé dans la mémoire du microcontrôleur et le robot est autonome en énergie grâce aux piles (ou la batterie) embarquées.
Le programme est sauvegardé dans la mémoire du microcontrôleur et le robot est autonome en énergie grâce aux piles (ou la batterie) embarquées.
![]() Le microcontrôleur exécute le programme en boucle tant que le système est alimenté en énergie.
Le microcontrôleur exécute le programme en boucle tant que le système est alimenté en énergie.
Documents joints
 AFFICHE pédagogique Shield-Moteur, PDF, 1 Mo
AFFICHE pédagogique Shield-Moteur, PDF, 1 Mo
- Podcast et RSS
- Plan
- Contact
- Mentions
- Aide
- Rédaction
- Se connecter

-
2014-2024 © TECHNOLOGIE - Collège Colette - Tous droits réservés
Ce site est géré sous SPIP 2.0.0 [14344] et utilise le squelette EVA-Web 4.1

Dernière mise à jour : lundi 13 mai 2019